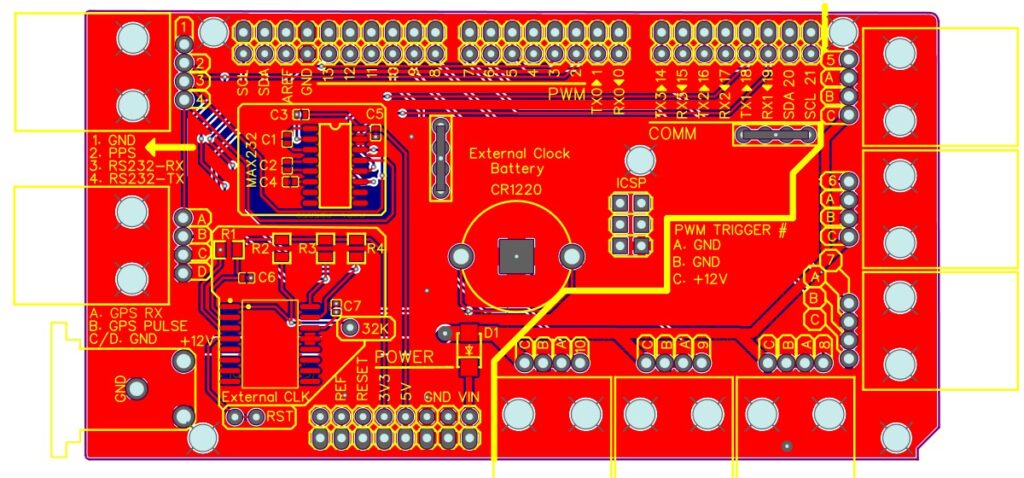
At Nissan, I designed an Arduino PCB “Shield” to synchronize the time from various sensors in real-time using GPS for an autonomous vehicle sensor stack. The group of sensors (LiDAR, camera, etc) are “synchronized” by the PCB.
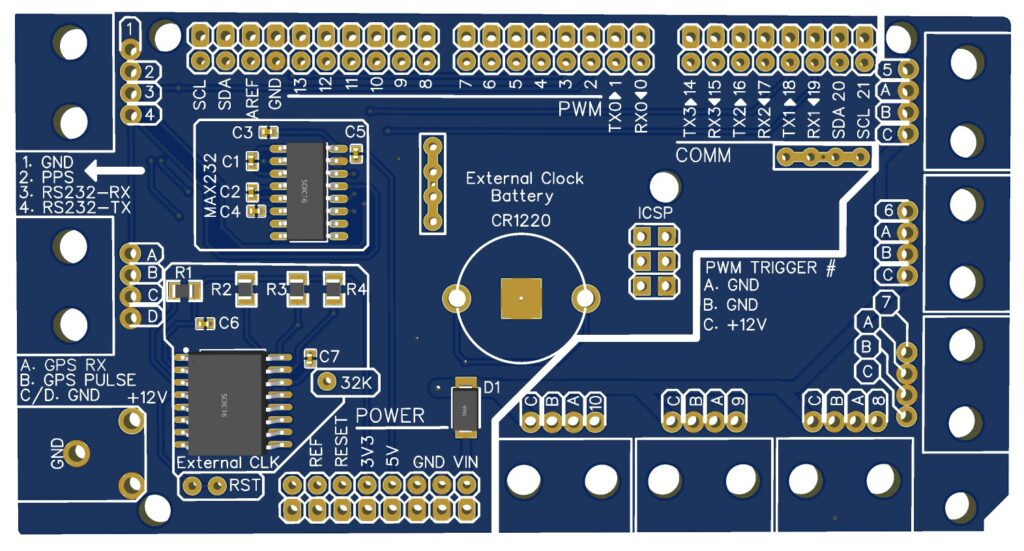
Real time clock data from GPS is converted to TTL and read by the Arduino via the “Max232” chip. The Arduino then triggers various sensors at specific times in order for the system to be “synchronized”.
An external clock and battery were implemented so the system does not have to re-sync with GPS clock continuously on every vehicle shutdown.
The circuit was designed on a breadboard first and then an automotive grade PCB was designed and implemented across a fleet of autonomous vehicles.
The PCBs are still in operation on the Nissan fleet of autonomous vehicles.